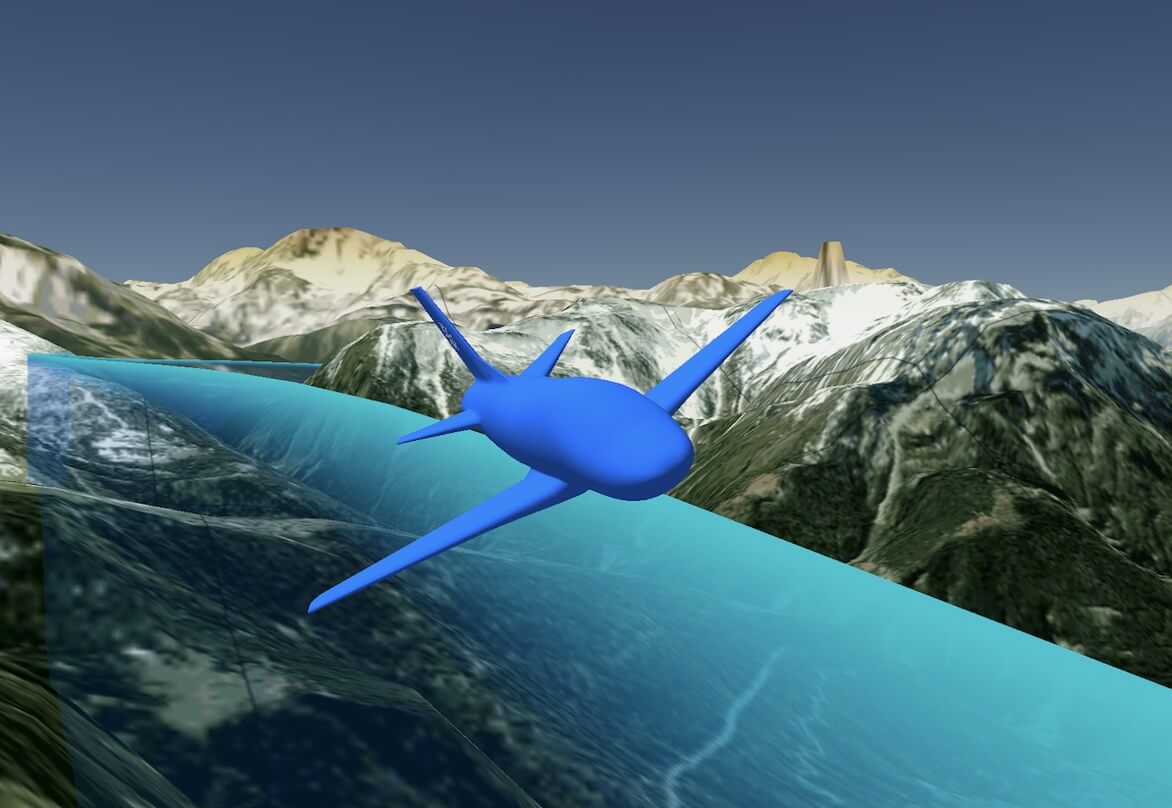
自主飞行系统 - 单机自主飞行功能 3D合成视景 融合地图构建:融合多源多模态的传感器数据(可见光、红外、雷达等),精准构建高精度三维环境地图,在低能见度条件和夜晚情况下,为飞行员、地面站操作人员和自主飞行系统提供各种条件下的视觉能力和信息提取 360度全景拼接:多视角的全景图像拼接,为飞行员、地面站操作人员和自主飞行系统提供更多角度的视野支持